A vektorová velikost je libovolný výraz představovaný vektorem, který má číselnou hodnotu (modul), směr, směr a bod aplikace. Některé příklady vektorových veličin jsou posunutí, rychlost, síla a elektrické pole.
Grafické znázornění vektorové veličiny se skládá ze šipky, jejíž špička označuje její směr a směr, její délkou je modul a počátečním bodem je počátek nebo bod aplikace..
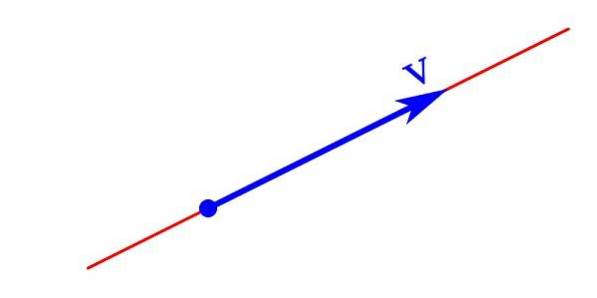
Množství vektoru je analyticky reprezentováno písmenem se šipkou nahoře směřující doprava v horizontálním směru. Může být také reprezentován písmenem napsaným tučně PROTI jehož modul ǀPROTIǀ je psáno kurzívou PROTI.
Jednou z aplikací konceptu vektorové velikosti je návrh dálnic a silnic, konkrétně návrh jejich zakřivení. Další aplikací je výpočet posunu mezi dvěma místy nebo změna rychlosti vozidla.
Rejstřík článků
Vektorové množství je jakákoli entita představovaná úsečkou orientovanou v prostoru, která má vlastnosti vektoru. Tyto vlastnosti jsou:
Modul: Je to číselná hodnota, která udává velikost nebo intenzitu velikosti vektoru.
Směr: Je to orientace úsečky v prostoru, který ji obsahuje. Vektor může mít horizontální, vertikální nebo nakloněný směr; sever, jih, východ nebo západ; severovýchod, jihovýchod, jihozápad nebo severozápad.
Smysl: Označeno šipkou na konci vektoru.
Bod aplikace: Jedná se o počátek nebo počáteční aktivační bod vektoru.
Vektory jsou klasifikovány jako kolineární, paralelní, kolmé, souběžné, koplanární, volné, posuvné, protilehlé, týmové, pevné a jednotkové..
Kolineární: Patří nebo jednají na stejné přímce, také se jim říká lineárně závislé a může být svislý, vodorovný a nakloněný.
Paralelní: Mají stejný směr nebo sklon.
Kolmý: dva vektory jsou navzájem kolmé, když je úhel mezi nimi 90 °.
Souběžně: Jsou to vektory, které se při klouzání podél linie působení shodují ve stejném bodě v prostoru.
Společníci: Působí v letadle, například v letadle xy.
Volný, uvolnit: Pohybují se v jakémkoli bodě vesmíru, zachovávají si svůj modul, směr a smysl.
Posuvníky: Pohybují se podél linie akce určené jejich směrem.
Protiklady: Mají stejný modul a směr a opačný směr.
Teamlenses: Mají stejný modul, směr a smysl.
Pevný: Mají aplikační bod neměnný.
Unitary: Vektory, jejichž modulem je jednotka.
Vektorové množství v trojrozměrném prostoru je reprezentováno v soustavě tří vzájemně kolmých os (X a Z) nazvaný ortogonální trihedral.
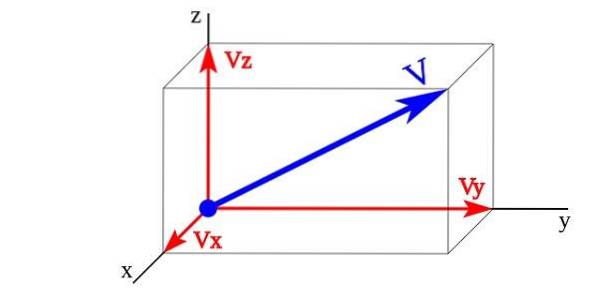
Na obrázku vektory Vx, Vy, Vz jsou vektorové komponenty vektoru PROTI jejichž jednotkové vektory jsou X,Y,z. Velikost vektoru PROTI je reprezentován součtem jeho vektorových složek.
PROTI = Vx + Vy + Vz
Výsledkem několika vektorových veličin je vektorový součet všech vektorů a nahradí tyto vektory v systému.
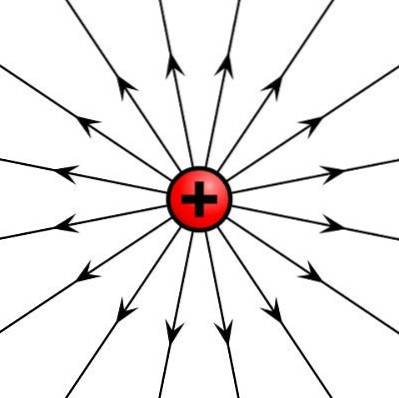
Vektorové pole je oblast prostoru, ve které vektorová velikost odpovídá každému z jejích bodů. V případě, že velikost, která se projevuje, je síla působící na tělo nebo fyzický systém, pak je vektorové pole polem sil.
Vektorové pole je graficky znázorněno siločarami, které jsou tečnými čarami velikosti vektoru ve všech bodech oblasti. Některé příklady vektorových polí jsou elektrické pole vytvořené bodovým elektrickým nábojem v prostoru a rychlostní pole kapaliny.
Přidávání vektorů: Je výslednicí dvou nebo více vektorů. Pokud máme dva vektory NEBO Y P součet je NEBO + P = Q. Vektor Q je výsledný vektor, který se získá graficky překladem počátku vektoru NA na konec vektoru B.
Vektorové odčítání: Odečtení dvou vektorů O a P to je NEBO - P = Q. Vektor Q se získá přidáním do vektoru NEBO je to naopak -P. Grafická metoda je stejná jako součet s tím rozdílem, že opačný vektor je přenesen do extrému.
Skalární součin: Produkt skalárního množství na vektorovou velikostí P je to vektor mP který má stejný směr vektoru P. Pokud je skalární velikost nula, skalární součin je nulový vektor.
Poloha objektu nebo částice vzhledem k referenčnímu systému je vektor, který je dán jeho obdélníkovými souřadnicemi X a Z, a je reprezentován jeho vektorovými komponentami xî, aĵ, zk. Vektory „, ĵ, k jsou to jednotkové vektory.
Částice v bodě (X a Z) má poziční vektor r = xî + aĵ + zk. Numerická hodnota vektoru polohy je r= √ (Xdva + Ydva + zdva). Změna polohy částice z jedné polohy do druhé vzhledem k referenčnímu rámci je vektor Výtlak Δr a počítá se s následujícím vektorovým výrazem:
Δr = rdva - r1
Průměrné zrychlení (nam) je definována jako změna rychlosti proti v časovém intervalu Δt a výraz pro jeho výpočet je nam= Δv / Δt, bytost Δv vektor změny rychlosti.
Okamžité zrychlení (na) je limit středního zrychlení nam když Δt je tak malý, že má sklon k nule. Okamžité zrychlení je vyjádřeno jako funkce jeho vektorových složek
na =naX„ +naY ĵ+ nazk
Gravitační přitažlivá síla vyvíjená hmotou M, nachází se na počátku, na jiné hmotě m v bodě ve vesmíru X, Y, z je vektorové pole zvané gravitační silové pole. Tato síla je dána výrazem:
F= (- mMG /r)ȓ
r = xî + a + zk
F = je gravitační síla fyzické velikosti
G = je univerzální gravitační konstanta
ȓ = je polohový vektor hmoty m

Zatím žádné komentáře