
The lineární rychlost je definována jako ta, která je vždy tangenciální k dráze, po které následuje částice, bez ohledu na její tvar. Pokud se částice pohybuje vždy přímočarou cestou, není problém představit si, jak vektor rychlosti sleduje tuto přímku.
Obecně se však pohyb provádí na libovolně tvarované křivce. Každou část křivky lze modelovat, jako by byla součástí kruhu o poloměru na, který je v každém bodě tečný k cestě, po které následuje.
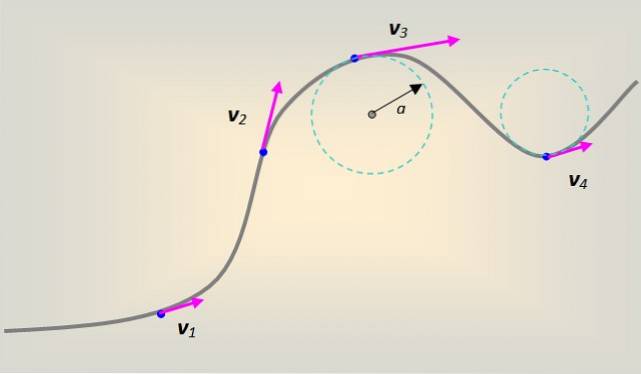
V tomto případě lineární rychlost doprovází křivku tangenciálně a vždy v každém jejím bodě..
Matematicky je okamžitá lineární rychlost derivací polohy vzhledem k času. Být r vektor polohy částice v okamžiku t, pak je lineární rychlost dána výrazem:
proti = r„(t) = dr / dt
To znamená, že lineární rychlost nebo tangenciální rychlost, jak se také často nazývá, není nic jiného než změna polohy vzhledem k času..
Rejstřík článků
Když je pohyb po obvodu, můžeme jít vedle částice v každém bodě a vidět, co se děje ve dvou velmi zvláštních směrech: jeden z nich je ten, který vždy směřuje ke středu. Toto je adresa radiální.
Další důležitý směr je ten, který prochází po obvodu, to je směr tangenciální a lineární rychlost to vždy má.
V případě rovnoměrného kruhového pohybu je důležité si uvědomit, že rychlost není konstantní, protože vektor mění svůj směr při rotaci částice, ale jeho modul (velikost vektoru), což je rychlost, ano, zůstává nezměněn.
Pro tento pohyb je poloha jako funkce času dána vztahem Svatý), kde s je on oblouk běh Y t Je čas. V takovém případě je okamžitá rychlost dána výrazem v = ds / dt a je to konstantní.
Pokud se mění i velikost rychlosti (již víme, že směr se vždy mění, jinak by se mobil nemohl otočit), čelíme různým kruhovým pohybům, během nichž může mobil kromě otáčení brzdit nebo zrychlovat.
Pohyb částice lze vidět také z pohledu zametaný úhel, místo toho, aby to dělalo podloubím. V takovém případě mluvíme o úhlová rychlost. Pro pohyb na obvodu poloměru R, existuje vztah mezi obloukem (v radiánech) a úhlem:
s = R θ
Odvození s ohledem na čas na obou stranách:
ds / dt = R (dθ/ dt)
Volání derivace θ vzhledem k t Co úhlová rychlost a označíme jej řeckým písmenem ω „omega“, máme tento vztah:
v = ωR
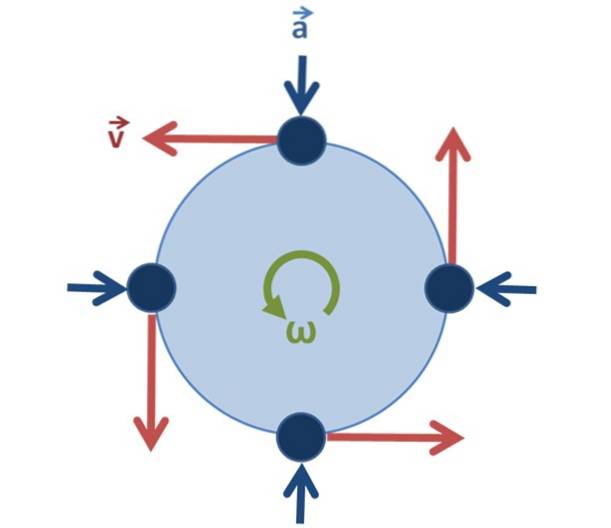
Všechny kruhové pohyby mají dostředivé zrychlení, který je vždy směrován do středu obvodu. Zajišťuje, že se rychlost mění, aby se pohybovala s částicemi, když se otáčí.
Dostředivé zrychlení naC nebo naR vždy směřuje do středu (viz obrázek 2) a souvisí s lineární rychlostí, jako je tato:
naC = vdva / R.
A s úhlovou rychlostí jako:
naC = (ωR)dva / R = ωdvaR
Pro rovnoměrný kruhový pohyb poloha Svatý) má tvar:
s (t) = so + vt
Kromě toho musí mít různý kruhový pohyb složku zrychlení, která se nazývá tangenciální zrychlení naT, která se zabývá změnou velikosti lineární rychlosti. Ano naT je to konstantní, pozice je:
s (t) = snebo + protinebot + ½ aTtdva
S protinebo jako počáteční rychlost.

Vyřešené problémy lineární rychlosti
Vyřešená cvičení pomáhají objasnit správné použití pojmů a rovnic uvedených výše..
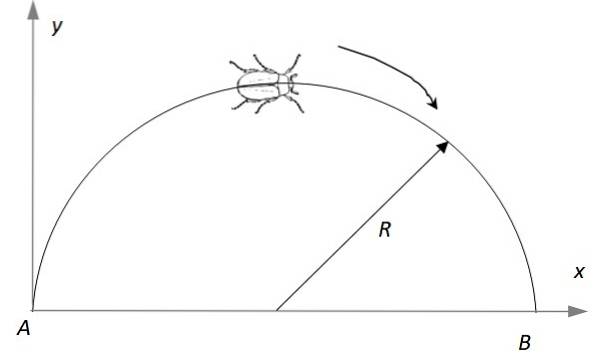
Hmyz se pohybuje po půlkruhu o poloměru R = 2 m, začíná v klidu v bodě A a zvyšuje svou lineární rychlost rychlostí p m / sdva. Najít: a) Po tom, jak dlouho dosáhne bodu B, b) Vektor lineární rychlosti v daném okamžiku, c) Vektor zrychlení v daném okamžiku.
a) Výrok naznačuje, že tangenciální zrychlení je konstantní a rovná se π m / sdva, pak je platné použít rovnici pro rovnoměrně proměnlivý pohyb:
s (t) = snebo + protinebot + ½ aT.tdva
Se snebo = 0 a vnebo = 0:
s (t) = ½ aT.tdva
s = πR (Poloviční délka obvodu)
t = (2. πR /naT) ½ s = (2π.2 / π)½s = 2 s
b) v (t) = vnebo + naT. t = 2π slečna
V bodě B směřuje vektor lineární rychlosti ve svislém směru dolů ve směru (-Y):
proti (t) = 2π slečna(-Y)
c) Tangenciální zrychlení již máme, dostředivé zrychlení chybí, aby měl vektor rychlosti na:
naC = vdva / R = (2π)dva / 2 m / sdva = 2πdva slečnadva
na = aC (-X) + aT (-Y) = 2πdva(-X) + π (-Y) slečnadva
Částice se otáčí v kruhu o poloměru 2,90 m. V určitém okamžiku je jeho zrychlení 1,05 m / sdva ve směru tak, že se svým směrem pohybu tvoří 32 °. Najděte jeho lineární rychlost v: a) v tomto okamžiku, b) o 2 sekundy později, za předpokladu, že tangenciální zrychlení je konstantní.
a) Směr pohybu je přesně tangenciální směr:
naT = 1,05 m / sdva . cos 32º = 0,89 m / sdva ; naC = 1,05 m / sdva . hřích 32º = 0,56 m / sdva
Rychlost se vymaže z naC = vdva / R. Co:
v = (R.aC)1/2 = 1,27 m / s
b) Pro rovnoměrně proměnlivý pohyb platí následující rovnice: v = vnebo + naTt = 1,27 + 0,89,2dva m / s = 4,83 m / s



Zatím žádné komentáře