
The pravidlo pravé ruky je mnemotechnický prostředek k určení směru a smyslu vektoru, který je výsledkem vektorového produktu nebo křížového produktu. Je široce používán ve fyzice, protože existují důležité vektorové veličiny, které jsou výsledkem vektorového produktu. Tak je tomu například v případě točivého momentu, magnetické síly, momentu hybnosti a magnetického momentu.
Dovolit být dva obecné vektory na Y b jehož křížový produkt je na X b. Modul takového vektoru je:
na X b = a.b. v α
Kde α je minimální úhel mezi na Y b, zatímco a a b představují jeho moduly. K rozlišení vektorů jejich modulů se používají tučná písmena.
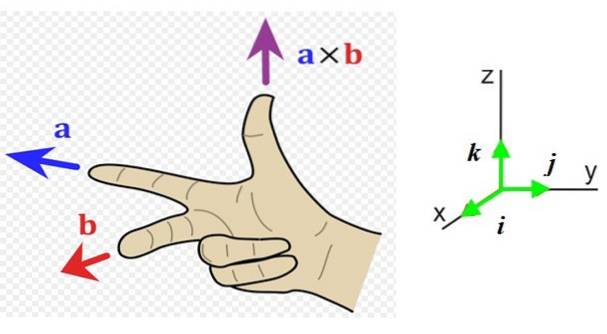
Nyní potřebujeme znát směr a smysl tohoto vektoru, takže je vhodné mít referenční systém se třemi směry prostoru (obrázek 1 vpravo). Jednotkové vektory i, j Y k míří příslušně na čtenáře (mimo stránku), doprava a nahoru.
V příkladu na obrázku 1 vlevo vektor na míří doleva (směr Y minus a ukazováček pravé ruky) a vektor b jde ke čtenáři (směr X pozitivní, prostředníček pravé ruky).
Výsledný vektor na X b má palec ve směru nahoru z pozitivní.
Rejstřík článků
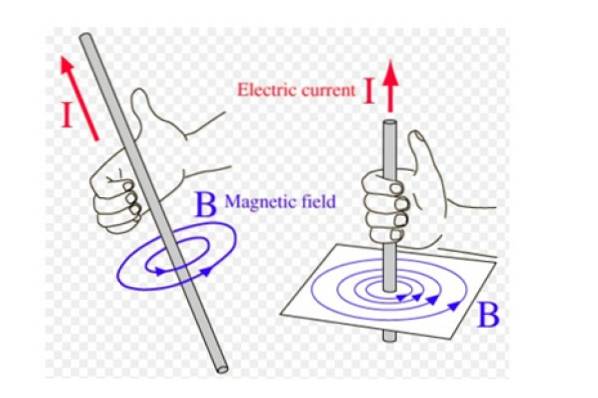
Toto pravidlo se také nazývá pravidlo pravého palce, Hodně se používá, když existují veličiny, jejichž směr a směr se otáčejí, například magnetické pole B tenkým přímým vodičem, který nese proud.
V tomto případě jsou magnetické siločáry soustředné kružnice s drátem a směr otáčení se získá tímto pravidlem následujícím způsobem: pravý palec ukazuje ve směru proudu a zbývající čtyři prsty jsou zakřivené ve směru venkov. Koncept ilustrujeme na obrázku 2.
Obrázek níže ukazuje alternativní formu pravidla pro pravou ruku. Vektory, které se objevují na obrázku, jsou:
-Rychlost proti bodového náboje q.
-Magnetické pole B ve kterém se zatížení pohybuje.
-FB síla, kterou magnetické pole působí na náboj.
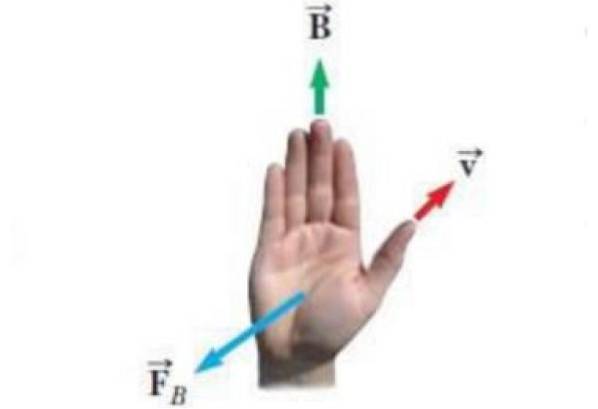
Rovnice pro magnetickou sílu je FB = qproti X B a pravidlem pravé ruky znát směr a smysl pro FB se použije takto: palec ukazuje podle v, čtyři zbývající prsty se umístí podle pole B. Potom FB je vektor, který vychází z dlaně ruky, kolmo na ni, jako by tlačil na zátěž.
Všimněte si, že FB Ukázal bych opačným směrem pokud byl náboj q záporný, protože vektorový produkt není komutativní. Ve skutečnosti:
na X b = - b X na
Pravidlo pravé ruky lze použít pro různé fyzikální veličiny, některé z nich si povíme:
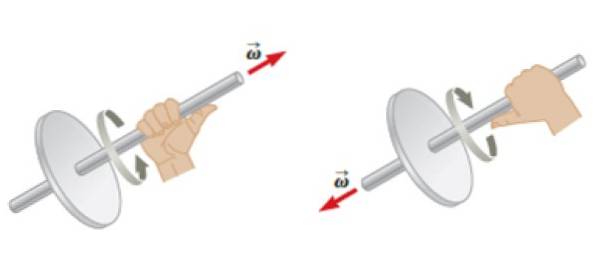
Obě úhlové rychlosti ω jako úhlové zrychlení α jsou to vektory. Pokud se objekt otáčí kolem pevné osy, je možné přiřadit směr a smysl těchto vektorů pomocí pravidla pravé ruky: čtyři prsty jsou zvlněné po rotaci a palec okamžitě nabízí směr a smysl úhlové rychlosti ω.
Úhlové zrychlení α bude mít stejnou adresu jako ω, ale jeho význam závisí na tom, zda ω se časem zvyšuje nebo snižuje. V prvním případě mají oba stejný směr a smysl, ale ve druhém budou mít opačné směry..
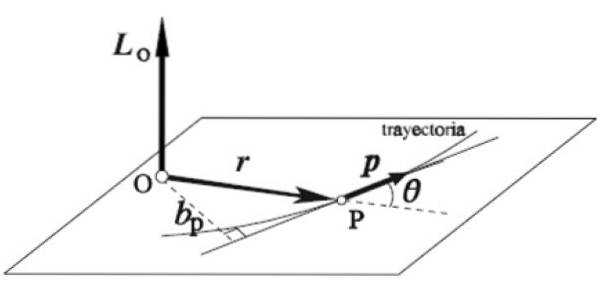
Vektor momentu hybnosti LNEBO částice, která se otáčí kolem určité osy O, je definována jako vektorový produkt jejího vektoru okamžité polohy r a lineární hybnost p:
L = r X p
Pravidlo pravé ruky se uplatňuje tímto způsobem: ukazováček je umístěn ve stejném směru a smyslu r, prostředníček na p, oba ve vodorovné rovině, jako na obrázku. Palec se automaticky vysune svisle nahoru, což naznačuje směr a smysl momentu hybnosti LNEBO.
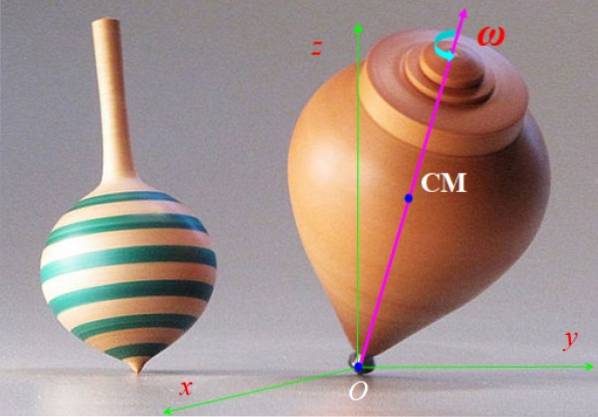
Vrchol na obrázku 6 se rychle otáčí s úhlovou rychlostí ω a jeho osa symetrie se otáčí pomaleji kolem svislé osy z. Tento pohyb se nazývá precese. Popište síly působící na rotující vršek a účinek, který produkují.
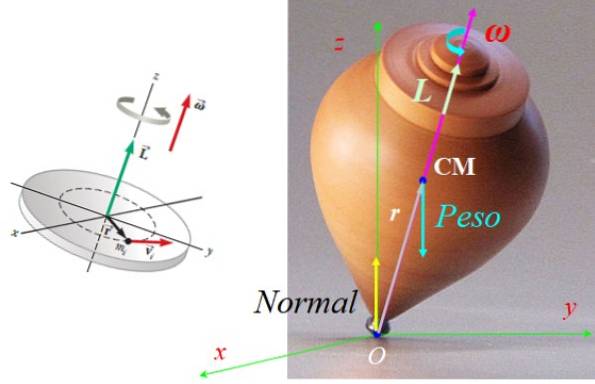
Síly působící na vrchol jsou normální N, aplikován na otočný bod se zemí O plus váha M.G, aplikován ve středu hmoty CM, s G gravitační vektor zrychlení, směrovaný svisle dolů (viz obrázek 7).
Obě síly se vyrovnávají, proto se vrchol nepohybuje. Hmotnost však vytváří točivý moment nebo točivý moment τ síť vzhledem k bodu O danému:
τNEBO = rNEBO X F, s F = MG.
Co r a M.G jsou vždy ve stejné rovině, jak se otáčí vršek, podle pravidla pravé ruky točivý moment τNEBO se vždy nachází v letadle xy, kolmo na oba r Co G.
Všimněte si, že N neprodukuje točivý moment vzhledem k O, protože jeho vektor r s ohledem na O je null. Tento točivý moment vytváří změnu momentu hybnosti, která způsobí, že vrchol předchází kolem osy Z..
Uveďte směr a smysl vektoru momentu hybnosti L horní části obrázku 6.
Jakýkoli bod na vrcholu má hmotnost mi, rychlost protii a polohový vektor ri, když se otáčí kolem osy z. Moment hybnosti Li uvedené částice je:
Li = ri X pi = ri x miprotii
Vzhledem k ri Y protii jsou kolmé, velikost L to je:
Li = miriprotii
Lineární rychlost proti souvisí s úhlovou rychlostí ω přes:
protii = riω
Proto:
Li = miri (riω) = miridvaω
Celkový moment hybnosti rotujícího vršku L je součtem momentu hybnosti každé částice:
L = (∑miridva ) ω
∑ miridva je moment setrvačnosti I vrcholu, pak:
L= Jáω
Proto L Y ω mají stejný směr a smysl, jak je znázorněno na obrázku 7.


Zatím žádné komentáře