
Varignonova věta v Mechanice uvádí, že součet momentů produkovaných soustavou souběžných sil vzhledem k určitému bodu se rovná okamžiku výsledné síly vzhledem ke stejnému bodu.
Z tohoto důvodu je tato věta známá také jako začátek okamžiků.
Ačkoli byl prvním, kdo vyslovil, byl to Holanďan Simon Stevin (1548-1620), tvůrce hydrostatického paradoxu, francouzský matematik Pierre Varignon (1654-1722), který mu dal konečnou podobu.
Příklad toho, jak Varignonova věta funguje v mechanice, je následující: Předpokládejme, že na bod působí jednoduchý systém dvou koplanárních a souběžných sil. F1 Y Fdva, (označeno tučně kvůli jejich vektorovému znaku). Tyto síly způsobují vznik čisté nebo výsledné síly zvané FR.
Každá síla vyvíjí točivý moment nebo moment kolem bodu O, který se vypočítá vektorovým součinem mezi polohovým vektorem rOP a sílu F, kde rOP je směrován z O do bodu souběžnosti P:
MO1 = rOP × F1
MO2 = rOP × Fdva
Vzhledem k FR = F1 + Fdva, pak:
MNEBO = rOP × F1 + rOP × Fdva = MO1 + MO2
Ale jak rOP je společným faktorem, tedy aplikace distribuční vlastnosti na křížový produkt:
MNEBO = rOP × (F1 + Fdva) = rOP × FR
Součet momentů nebo momentů každé síly vzhledem k bodu O je tedy ekvivalentní momentu výsledné síly vzhledem ke stejnému bodu.
Dovolit být systém N souběžných sil, tvořený F1, Fdva, F3... FN, jehož linie působení se protínají v bodě P (viz obrázek 1), moment této silové soustavy MNEBO, s ohledem na bod O je dán vztahem:
MNEBO = rOP × F1 + rOP × Fdva + rOP × F3 +... rOP × FN = rOP × (F1 + Fdva + F3 +... FN)
K prokázání věty se využívá distribuční vlastnosti vektorového produktu mezi vektory.
Buďte silami F1, Fdva, F3... FN aplikováno na body A1, NAdva, NA3… TON a souběžně v bodě P. Výsledný moment tohoto systému, vzhledem k bodu O, nazvaný MNEBO, je součet momentů každé síly vzhledem k uvedenému bodu:
MNEBO = ∑ rOAi × Fi
Kde součet jde od i = 1 do i = N, protože existuje N sil. Jelikož máme co do činění se souběžnými silami a protože vektorový produkt mezi paralelními vektory je nulový, stává se, že:
rPAi × Fi = 0
S nulovým vektorem označeným jako 0.
Okamžik jedné ze sil vzhledem k O, například moment síly Fi aplikováno v Ai, píše se to takto:
Mslyšel jsem = rOAi × Fi
Vektor polohy rOAi lze vyjádřit jako součet dvou polohových vektorů:
rOAi = rOP + rPAi
Tímto způsobem moment o O síly Fi to je:
Mslyšel jsem = (rOP + rPAi) × Fi = (rOP × Fi) + (rPAi × Fi)
Ale poslední člen je nulový, jak bylo vysvětleno výše, protože rPAi je v přímce akce Fi, Tím pádem:
Mslyšel jsem = rOP × Fi
S vědomím, že moment systému vzhledem k bodu O je součtem všech jednotlivých momentů každé síly vzhledem k uvedenému bodu, pak:
MNEBO = ∑ Mslyšel jsem = ∑ rOP × Fi
Co rOP je konstantní vychází ze součtu:
MNEBO = rOP × (∑ Fi)
Ale ∑ Fi je prostě čistá síla nebo výsledná síla FR, je proto okamžitě učiněn závěr, že:
MNEBO = rOP × FR
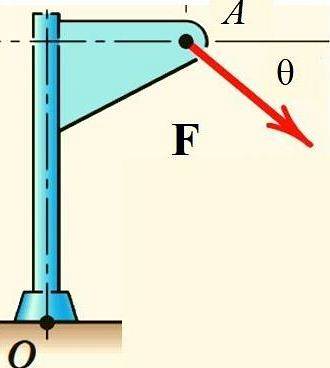
Varignonova věta usnadňuje výpočet momentu síly F Pokud jde o bod O ve struktuře zobrazené na obrázku, je-li síla rozložena na její obdélníkové složky a vypočítá se moment každé z nich:
Když je známa výsledná síla systému, lze použít Varignonovu větu, která nahradí součet každého z momentů produkovaných silami, které ji tvoří, momentem výslednice.
Pokud systém sestává ze sil ve stejné rovině a bod, ke kterému se má vypočítat moment, patří do této roviny, je výsledný moment kolmý.
Například pokud jsou všechny síly v rovině xy, moment je směrován v ose z a zbývá jen najít jeho velikost a smysl, jako je tomu v příkladu popsaném výše.
V tomto případě nám Varignonova věta umožňuje spočítat výsledný moment systému součtem. Je to velmi užitečné v případě trojrozměrného silového systému, pro který a priori není znám směr výsledného momentu.
K řešení těchto cvičení je vhodné rozložit síly a polohové vektory na jejich obdélníkové složky a ze součtu momentů určit složky čistého momentu.
Pomocí Varignonovy věty vypočítáme moment síly F kolem bodu O zobrazeného na obrázku, pokud je velikost F 725 N.
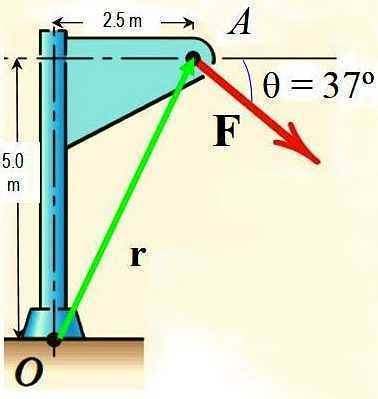
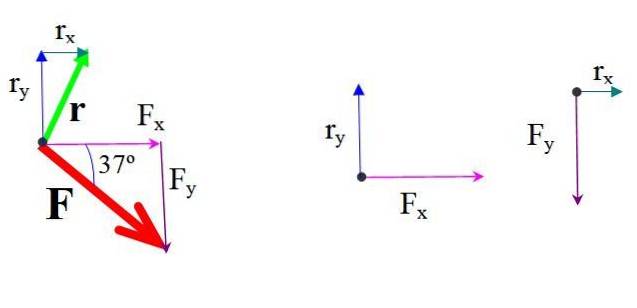
Chcete-li použít Varignonovu větu, rozložte sílu F ve dvou složkách, jejichž příslušné momenty kolem O jsou vypočítány a přidány k získání výsledného momentu.
FX = 725 N ∙ cos 37 º = 579,0 N
FY = - 725 N N ∙ sin 37 º = −436,3 N
Podobně poziční vektor r směrovaný z O do A má komponenty:
rX = 2,5 m
rY = 5,0 m
Okamžik každé složky síly kolem O se zjistí vynásobením síly a kolmé vzdálenosti.
Obě síly mají tendenci otáčet strukturu ve stejném směru, který je v tomto případě ve směru hodinových ručiček, kterému je libovolně přiřazeno kladné znaménko:
MVůl = FX∙ rY ∙ sin 90º = 579,0 N ∙ 5,0 m = 2895 N ∙ m
MDobře = FY∙ rX ∙ sin (−90 °) = −436,3 N ∙ 2,5 m ∙ (−1) = 1090,8 N ∙ m
Výsledný moment o O je:
MNEBO = MVůl + MDobře = 3985,8 N ∙ m kolmo k rovině a ve směru hodinových ručiček.

Zatím žádné komentáře